PointPillars is a 3D object detector from LiDAR point cloud, please refer to the paper for more details:
Lang, Alex H., et al. "PointPillars: Fast encoders for object detection from point clouds." arXiv preprint arXiv:1812.05784(2018).
-
We train the PointPillars on Kitti 3D object detection dataset (only trained for class “car”). Total training step: 296960.
-
We randomly remove LiDAR points from validation subset to simulate an attack that affects the LiDAR receives less points. Then, we evaluate the robustness of the PointPillars under such an attack.
In the following table, we report the AP@0.70 of PointPillars on car 3D location detection from LiDAR point cloud.
Scheme Ratio of Points Easy Moderate Hard PointPillars 100% (ori) 85.39 76.56 79.04 PointPillars 80% 80.63 70.58 68.23 PointPillars 60% 80.16 69.87 67.29 PointPillars 40% 77.36 66.12 60.63 PointPillars 20% 64.97 52.73 47.31
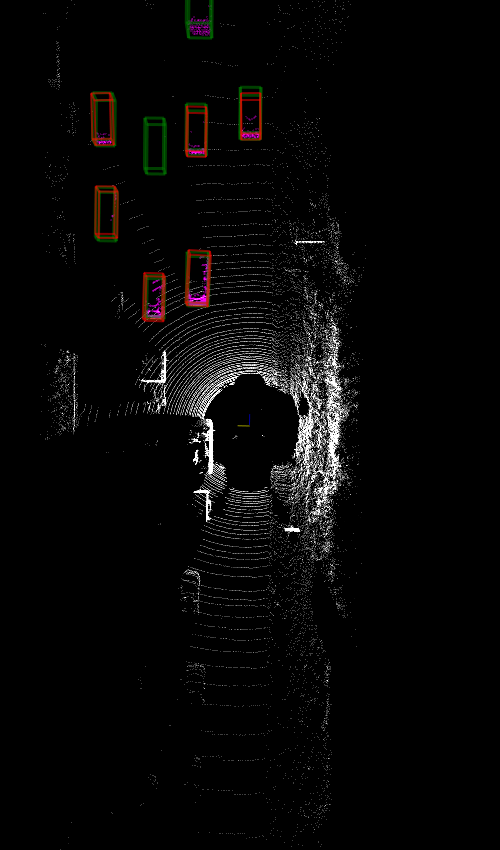
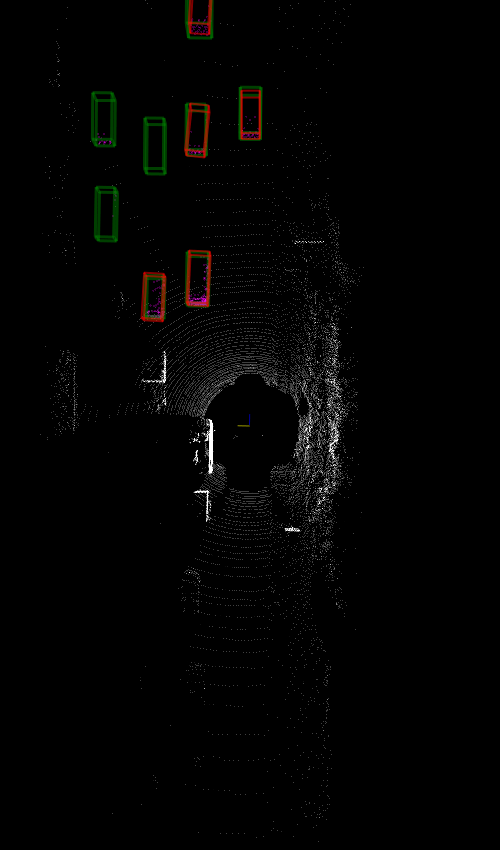
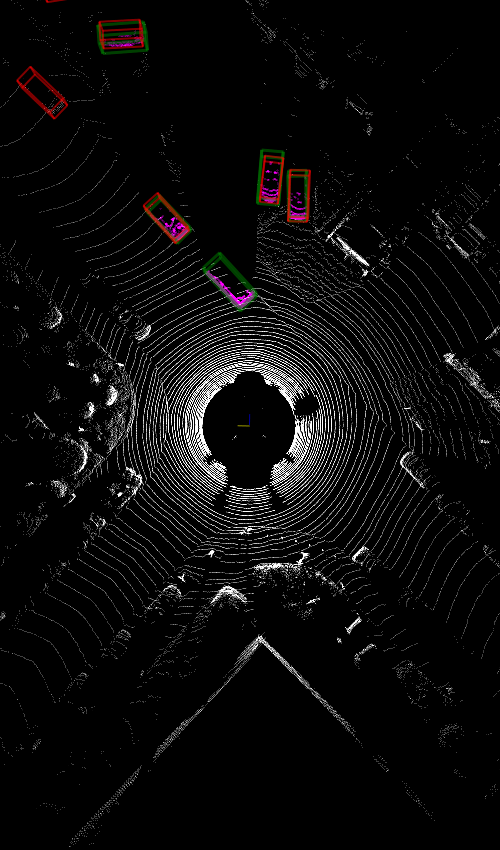
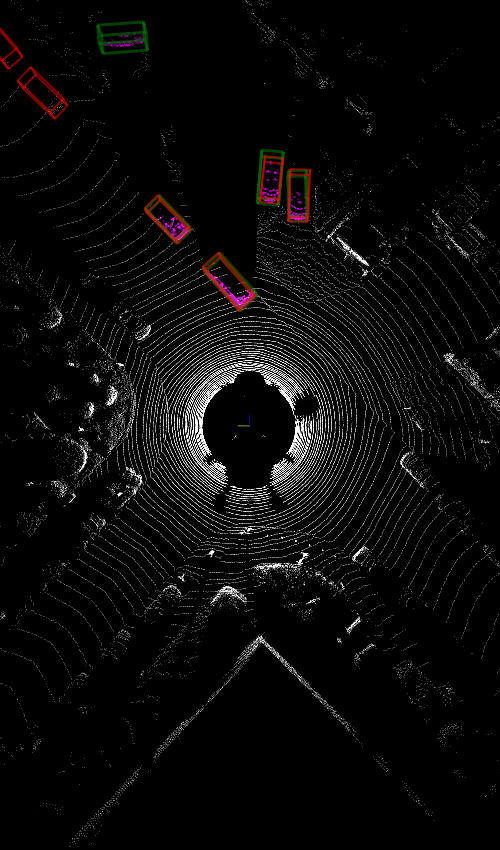
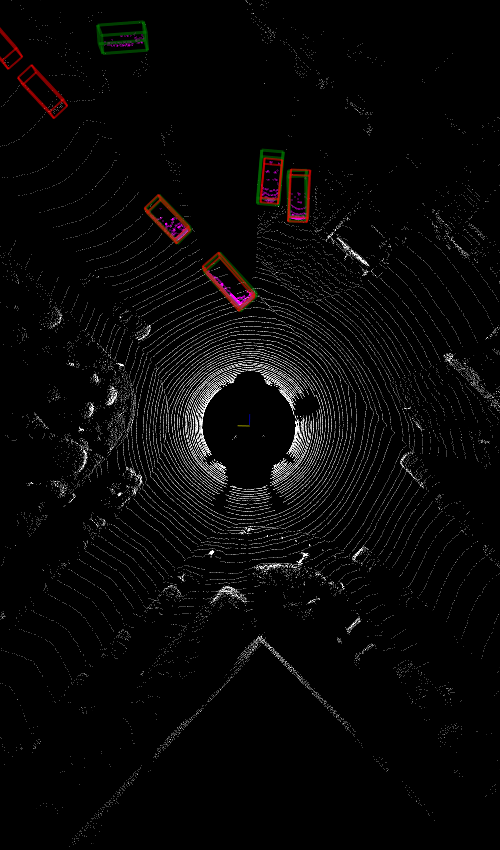
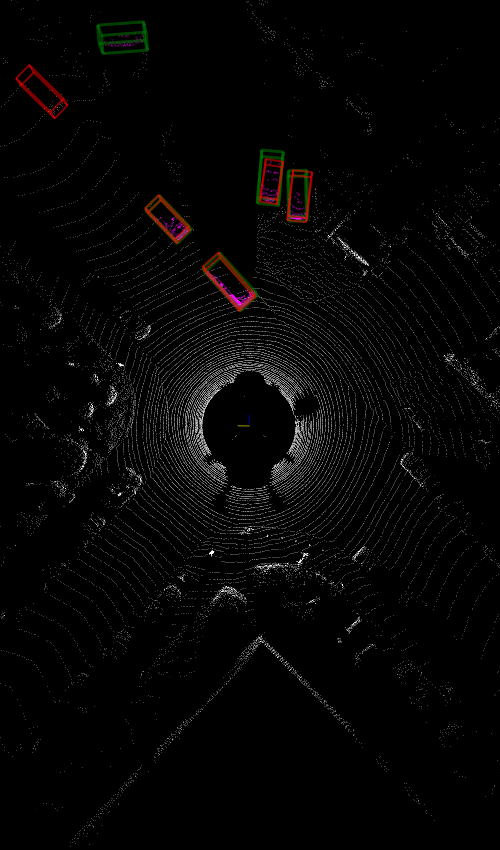
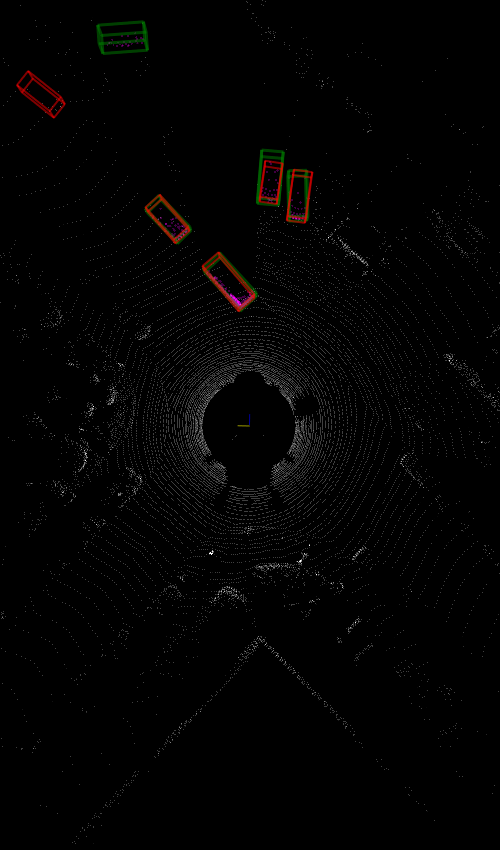
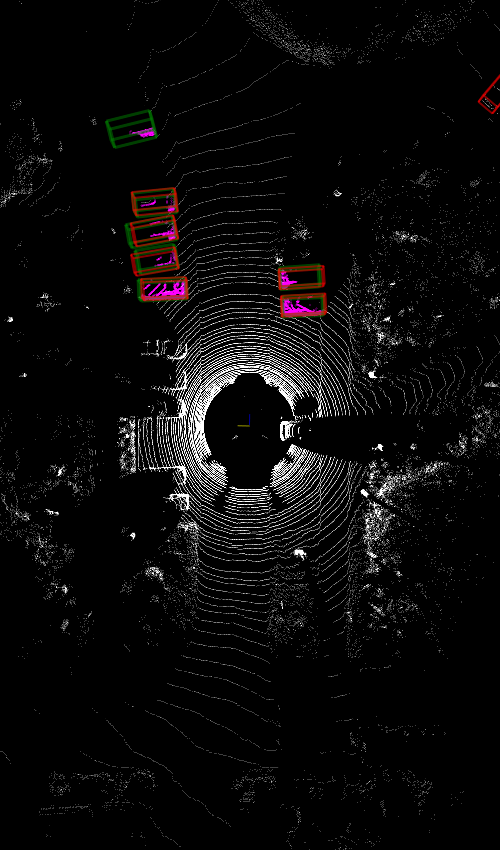
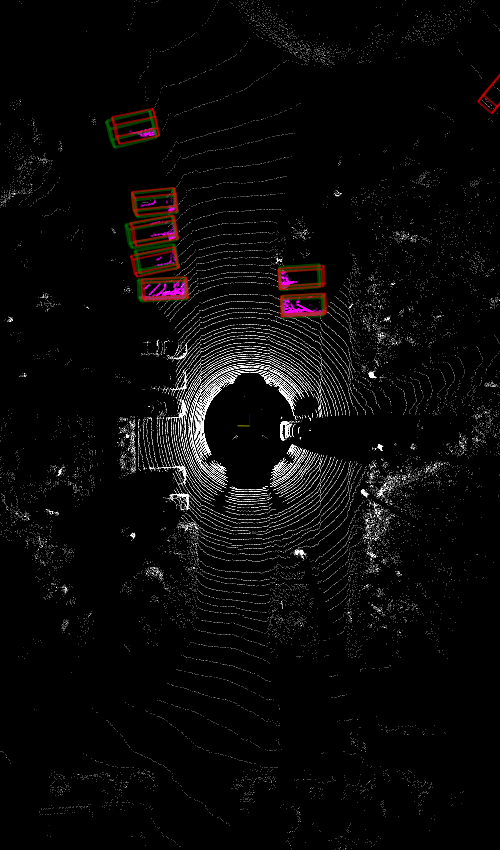
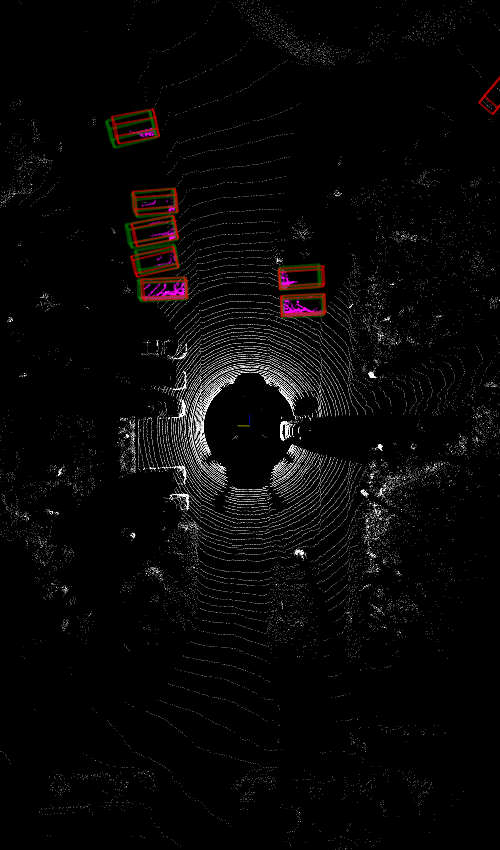
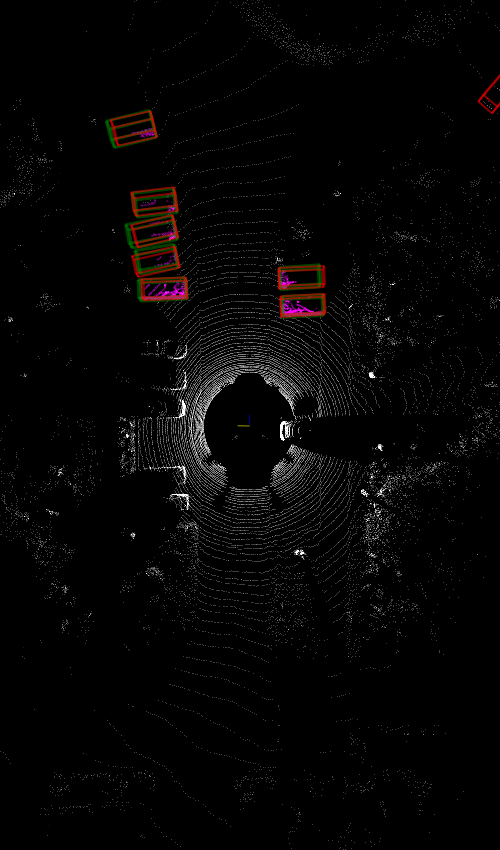
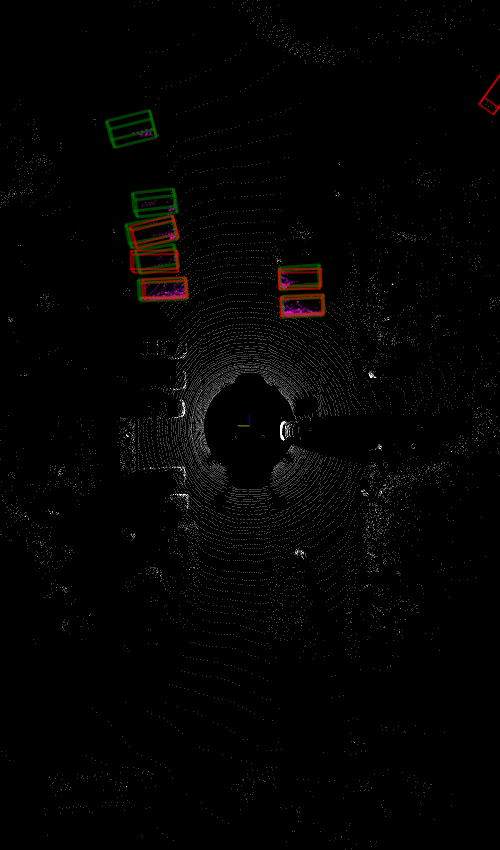
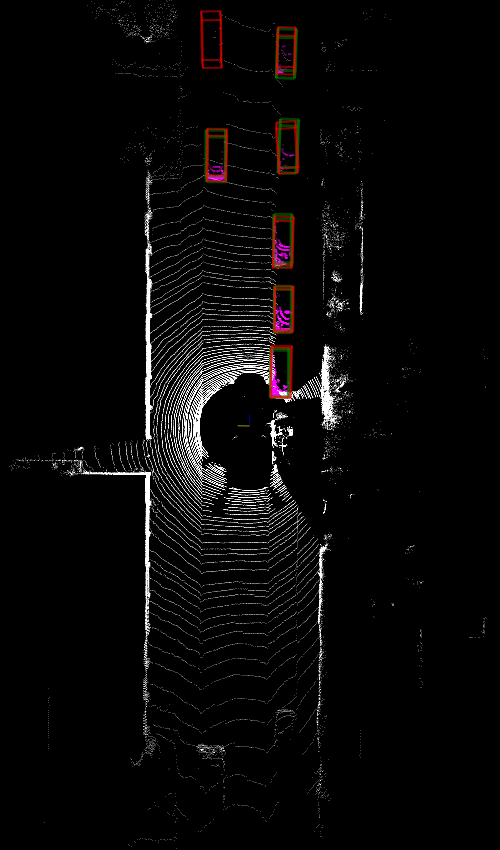
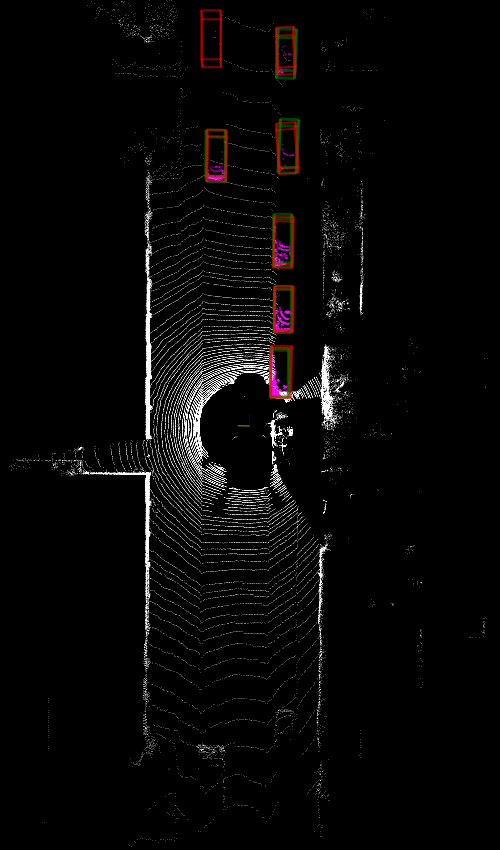
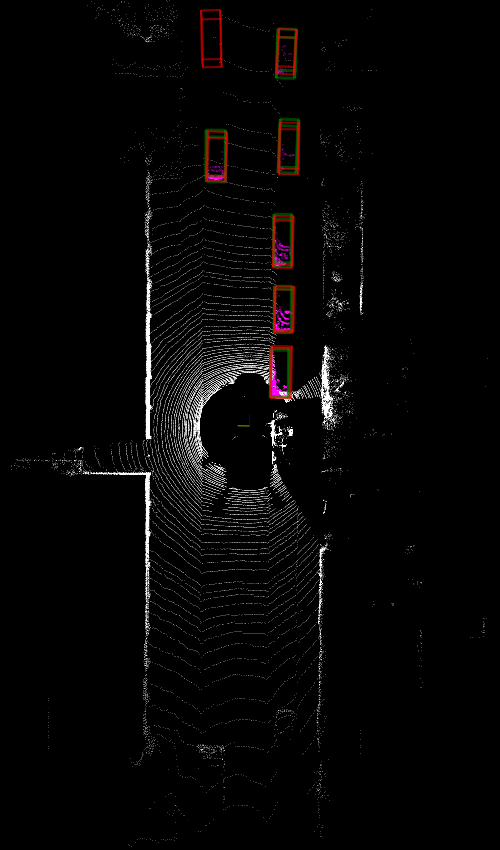
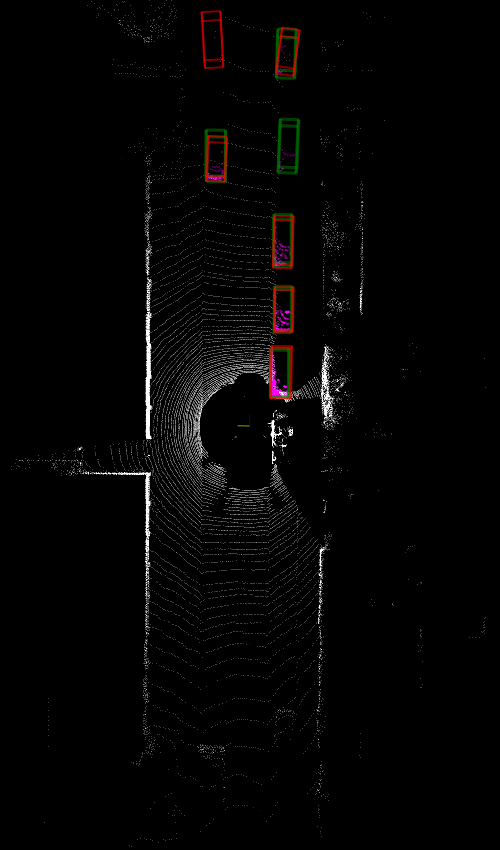
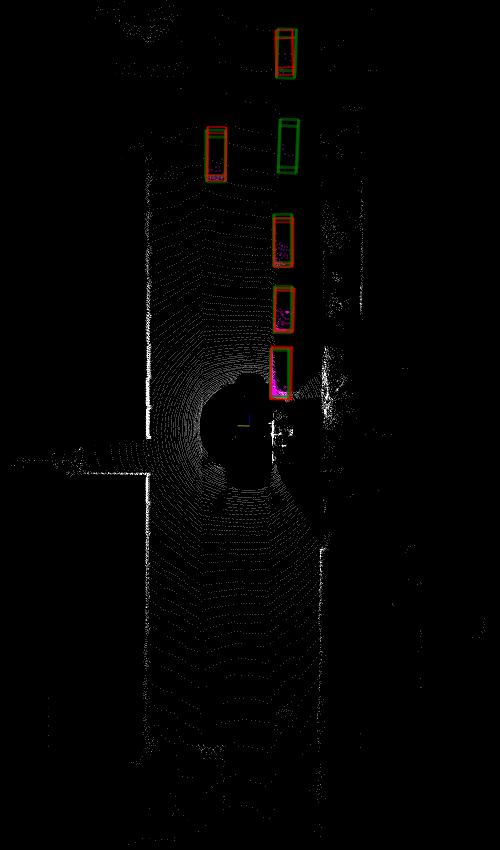
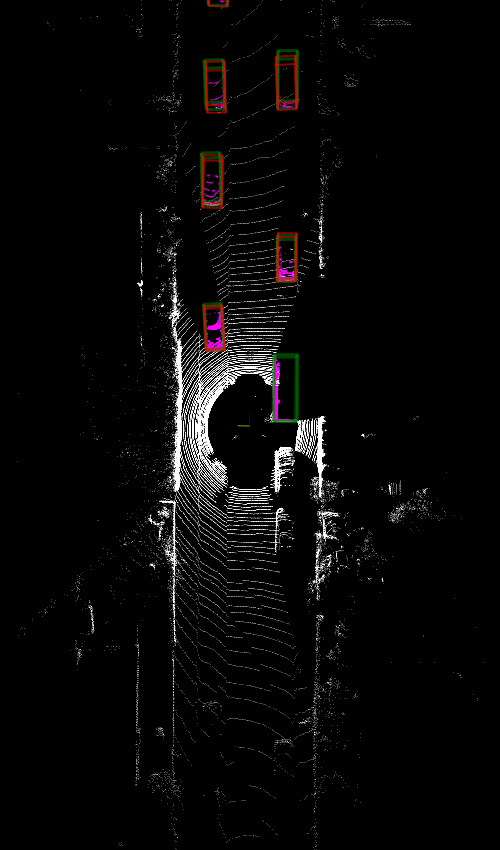
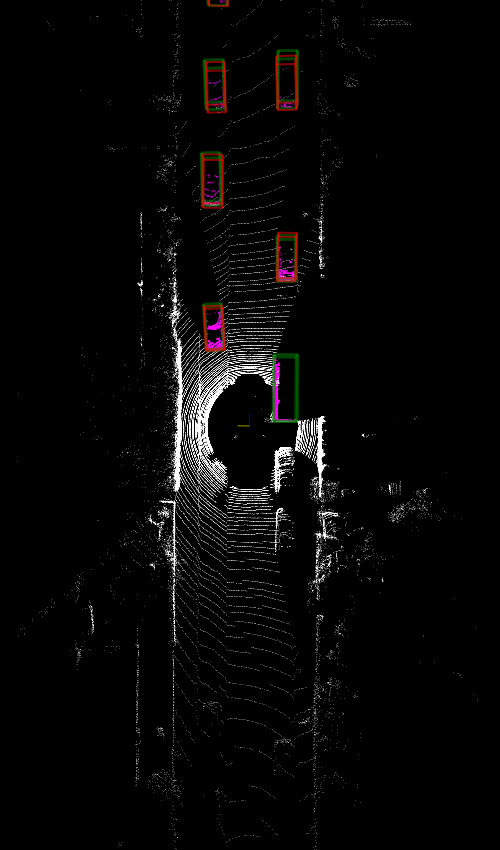
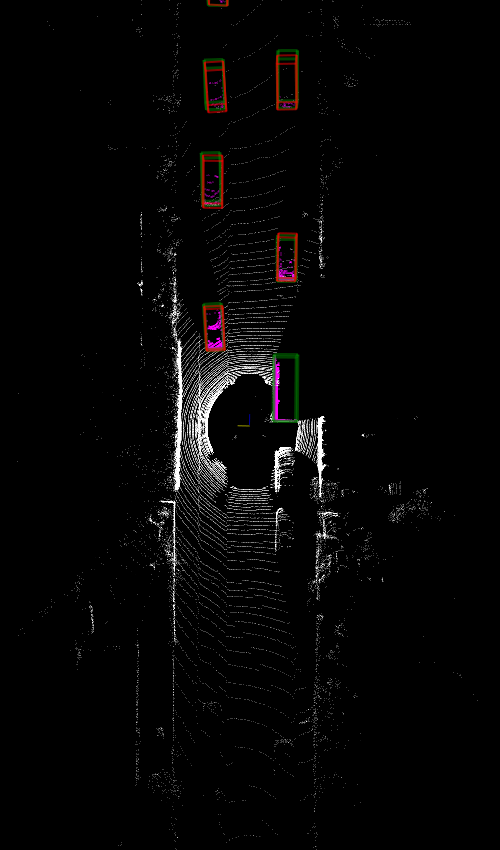
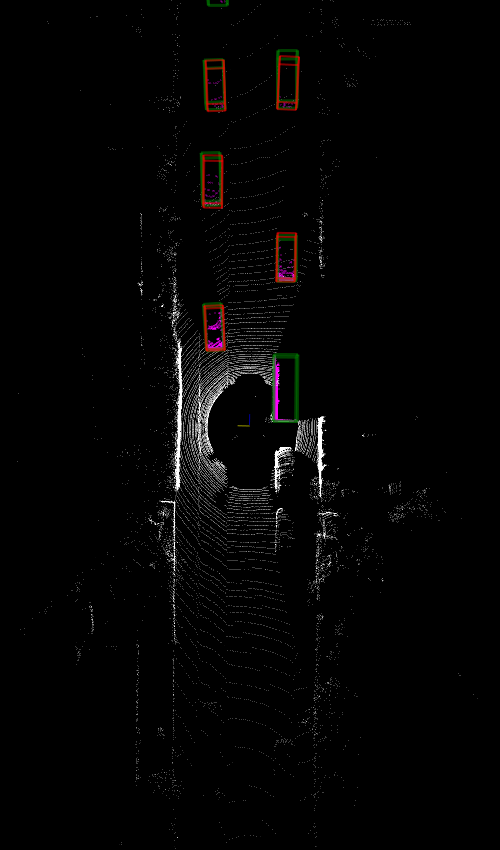
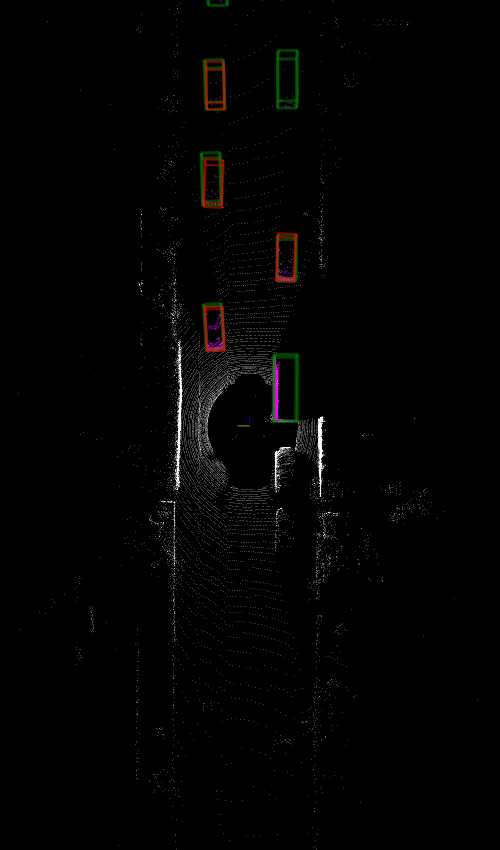
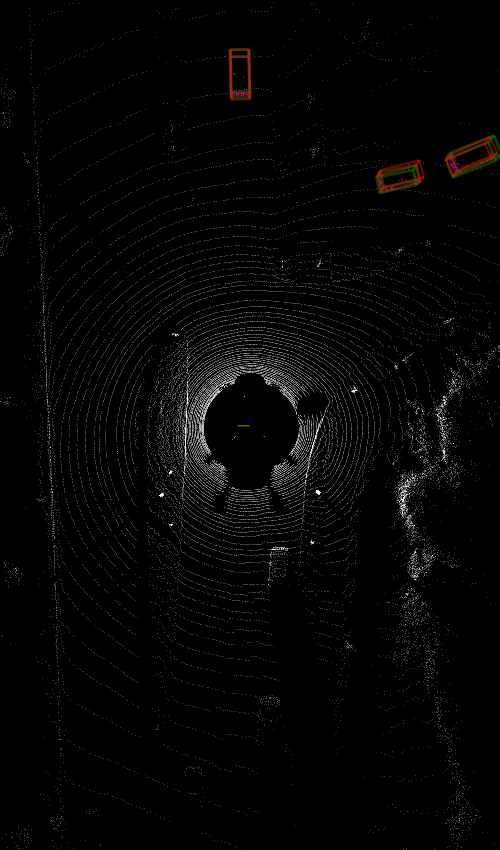
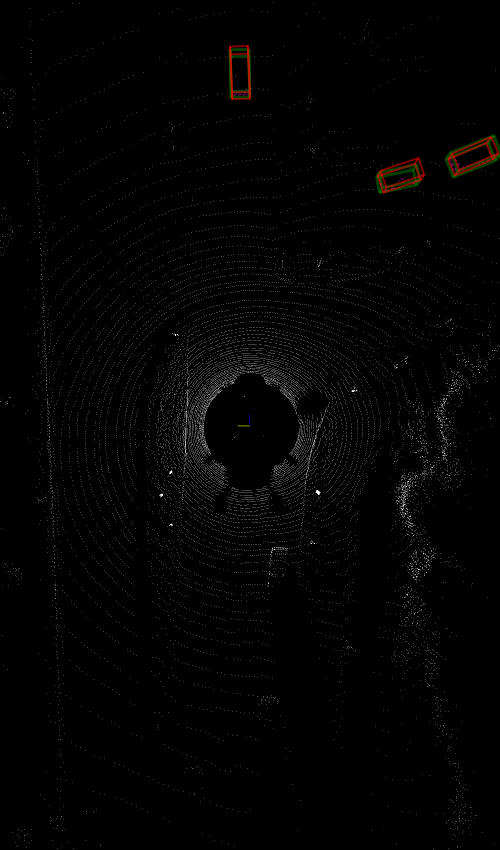
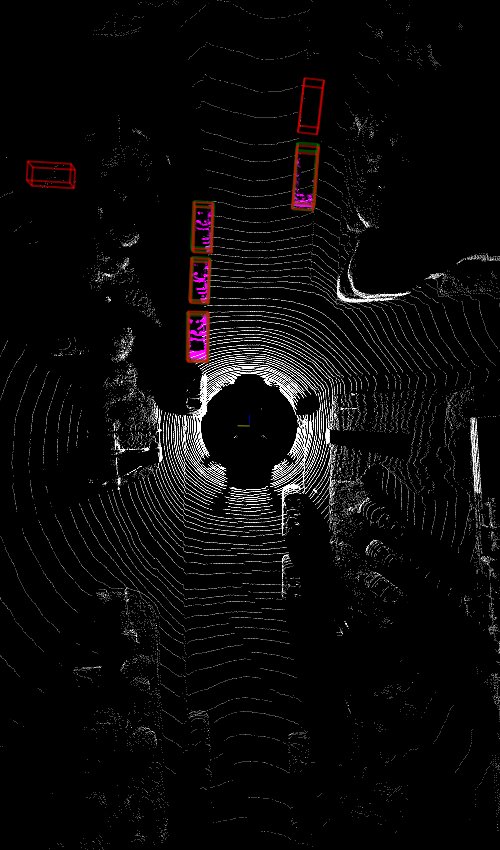
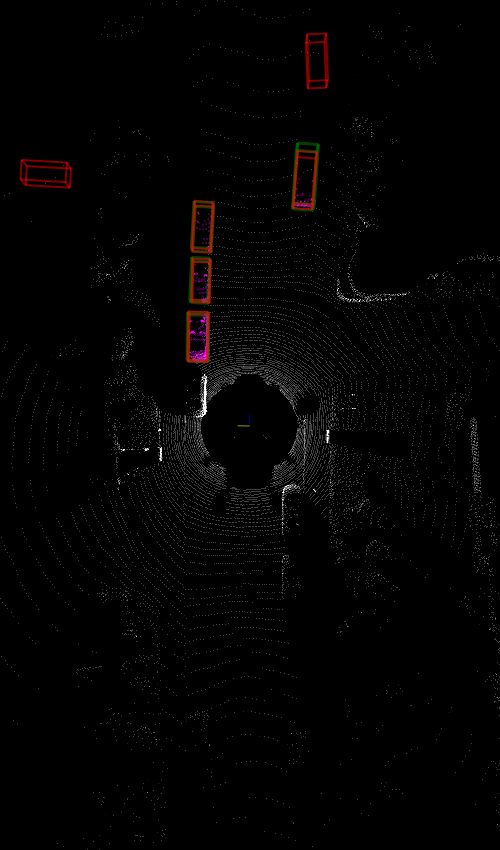
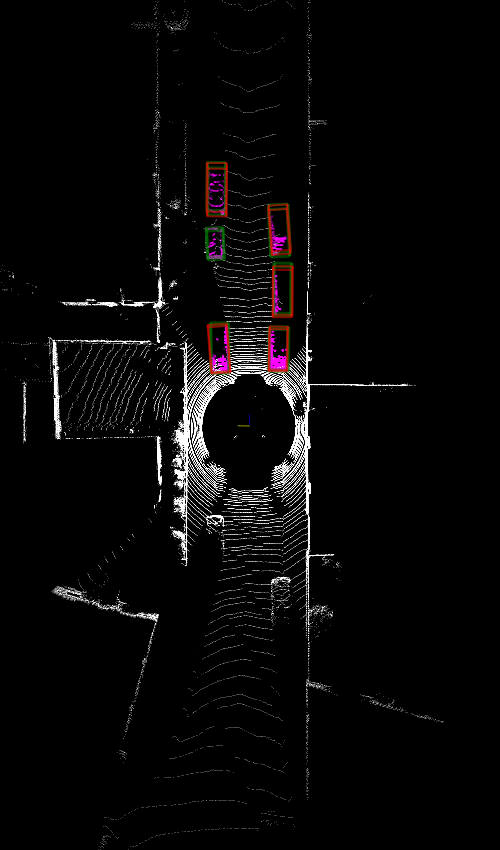
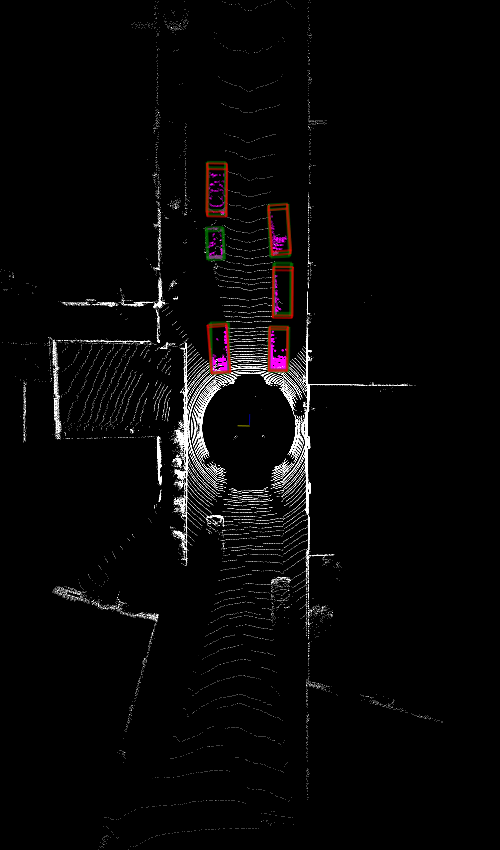
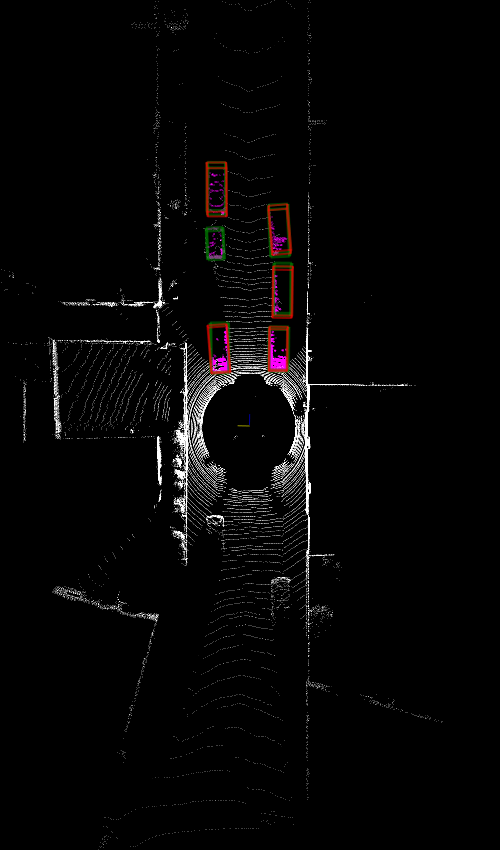
Here, we visualize several samples:
- Green rectangles are ground truth.
- Red rectangles are PointPillars detection results.
- Purple points are ground truth points of cars.
| Animation | Front View Camera | 100% Points | 80% Points | 60% Points | 40% Points | 20% Points |
|---|---|---|---|---|---|---|
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |